杠杆炒股,股票融资!


裁剪:KingHZ 好困
【新智元导读】斯坦福李飞飞团队在「保姆型」机器东说念主上新冲突!建议BRS空洞框架,以后机器东说念主推行畴前家务更自主、更可靠。
对东说念主类来说成竹于胸的事,对机器东说念主来说很难。
机器东说念主能作念家庭管家,珍视好一家东说念主吗?要作念「家庭管家」,机器东说念主确凿需要什么妙技?
最近,来自斯坦福的李飞飞团队,建议了一种一个面向各种化家庭任务的全身操作空洞框架——「行径机器东说念主套件」(𝗕𝗘𝗛𝗔𝗩𝗜𝗢𝗥 𝗥𝗼𝗯𝗼𝘁 𝗦𝘂𝗶𝘁𝗲,𝗕𝗥𝗦)。
从倒垃圾、整理衣物再到刷马桶——𝗕𝗥𝗦让机器东说念主冒昧支吾本体的畴前任务。
论文都集:https://arxiv.org/abs/2503.05652
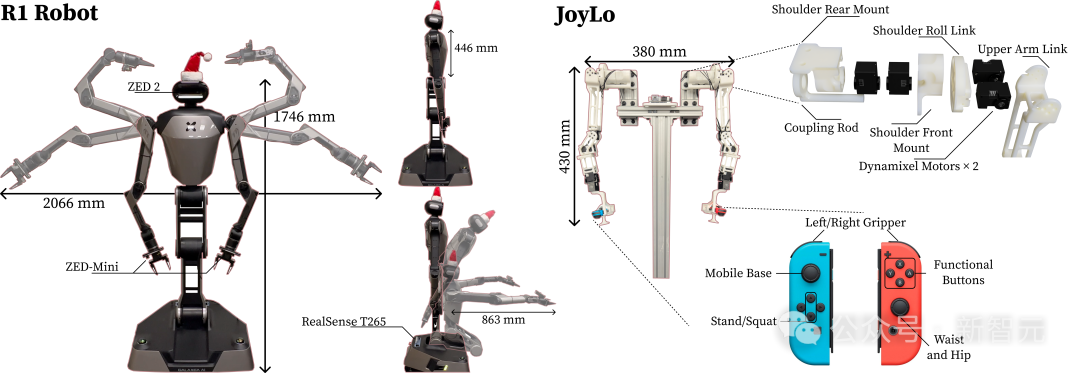
掀开新闻客户端 擢升3倍领路度要结束全身操控,悉心策画的机器东说念主硬件至关紧要,包括双臂、挪动底座和天真躯干。
可是,这种复杂的策画也给战略学习带来了难题,尤其是在扩大数据会聚范围和精确建模合营的全身动作以顺应复杂的真实环境方面。
为此,团队制作了这款基于配备4解放度(DoF)躯干的双臂轮式机器东说念主,并通过两大中枢立异同期管束硬件和学习难题:
JoyLo:一个经济高效的全身遥操作界面(用于数据会聚)
WB-VIMA:一个有益用于学习全身视觉通顺战略的立异算法
李飞飞称,机器东说念主学习范围的「圣杯」之一,是推行可泛化的畴前家庭挪动操作任务。
借助新式双手挪动机器东说念主,咱们最新研发的BEHAVIOR机器东说念主套件(BRS)向这一极其贫穷、尚未管束的难题发起了挑战!
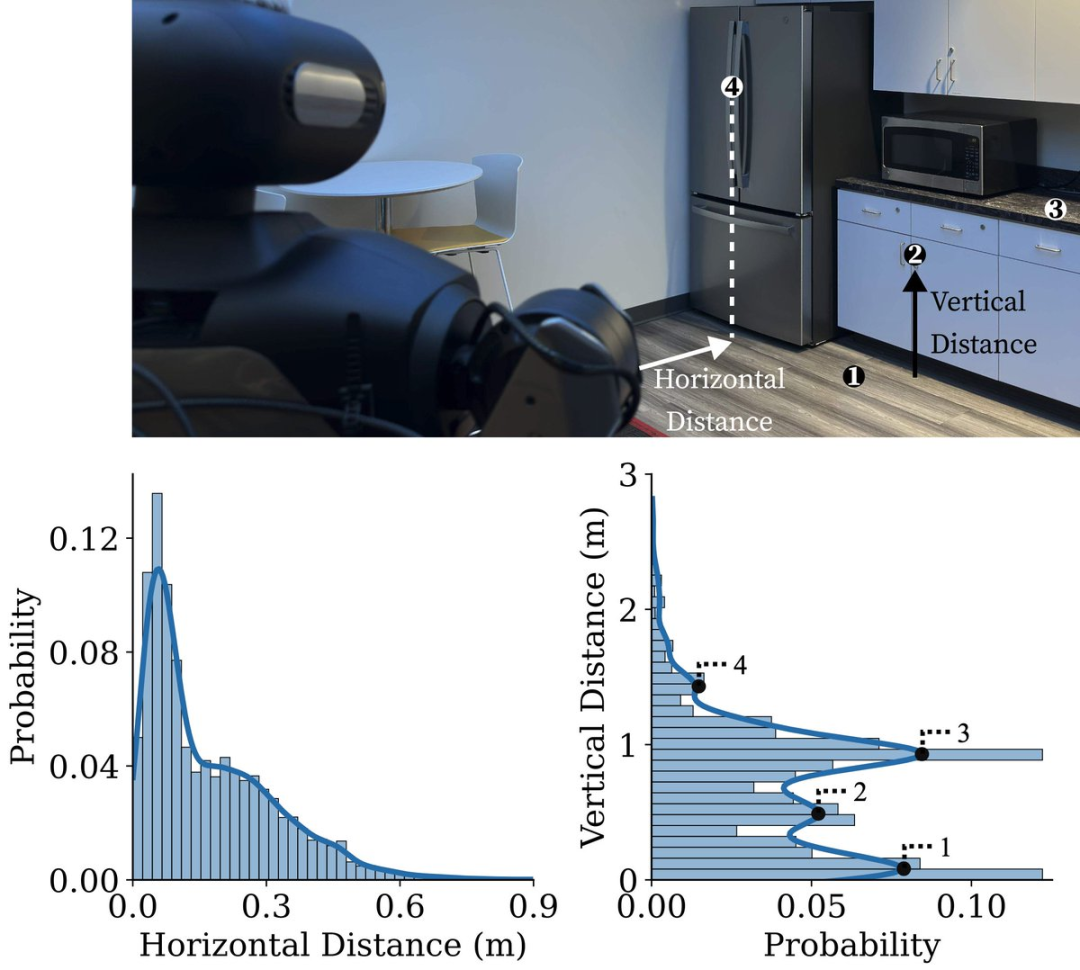
难题:结尾推行器的可达性
大大宗东说念主以为,机器东说念主必须具备挪动性并配备双臂,身手有用完成畴前家务。
可是,频频淡薄另一项关键智商:结尾推行器的可达性。
家中的物品摆放高度和位置各不疏浚,机器东说念主需要字据情况迁移其可达范围(见下方散播图)。
具备双臂、轮式底盘以及天真躯干的机器东说念主,特别有可能管束这一问题,但也带来了更高的复杂性。
这种复杂性给视觉-通顺战略学习带来了紧要挑战,尤其是在扩大数据会聚范围和精确建模合营的全身动作以顺应真实场景时。
高度和距离对机器东说念主的影响
数据会聚
为了管束数据会聚的难题,团队推出了JoyLo——一种专揽常见硬件(Nintendo Switch手柄)结束全身纵容的经济高效接口!

通过将Switch手柄安设在3D打印的相投臂上,JoyLo让用户冒昧直不雅且精确地操控机器东说念主的全身动作。
举例,它不错匡助用户合营复杂的全身通顺(比如弹吉他),提供丰富的触觉反馈,并生成高质料的示范数据,这些关于视觉-通顺战略学习至关紧要。而且,它的资本便宜,使用门槛也很低。
掀开新闻客户端 擢升3倍领路度模子学习
学习难题则由认真WB-VIMA管束,这是一种有益用于精确建模全身合营动作的新算法。
盘考东说念主员发现,在东说念主形机器东说念主上,挪动底座或躯干的微弱舛误会被放大,最终影响机器东说念主结尾推行器的精确度。
WB-VIMA是一种师法学习算法,有益用于建模机器东说念主的全身动作,并充分专揽其固有的通顺学层级结构。
中枢念念路是机器东说念主各要害之间存在强关联性——上游部位(如躯干)的渺小动作,可能会导致下流部位(如结尾推行器)发生较大位移。
因此,为了确保所谋划节的精确合营,WB-VIMA采选层级条款瞻望面目,即:下流部位的动作瞻望基于上游部位的动作,从而结束更同步的全身通顺。
WB-VIMA采选自回顾面目在通盘机器东说念主结构中步骤解码动作:
早先瞻望挪动底座的动作
再字据底座的瞻望动作来迁移躯干的动作
临了在底座和躯干动作的基础上,瞻望手臂的动作
此外,WB-VIMA通过自贯注力机制,动态整合多模态感知信息,从而擢升系统的鲁棒性暄和应性。
实验
受BEHAVIOR-1K中界说的畴前行为启发,盘考团队选拔了具有代表性的家庭任务来展示BRS的智商,包括以下五项家务:
把垃圾带到外面
把物品放到架子上
摆放衣物
清洁马桶
在狂欢派对后打扫房间
这些任务需要3个关键的全身纵容智商:双手合营、褂讪精确的导航以及机械臂结尾推行器的庸碌可达性。
通盘任务都在真实宇宙的未经调动的环境中进行,使用东说念主类畴前战斗的物品。
这些任务都是持久任务,东说念主类操作员使用JoyLo完成这些任务需要60至210秒不等。
由于这些行为的多阶段性质,每个任务都被分裂为多个子任务「ST」(SubTask)。
BRS让机器东说念主得胜完成了这些各种化的家务任务,何况新算法WB-VIMA在通盘测试中褂讪高出基准款式(详见下方拆伙)。
接下来的有战略推行的视频,快来望望吧!
BRS扶植各式家庭行为
任务1:倒垃圾
对机器东说念主而言,完成倒垃圾的最关键的智商褂讪和精确的导航。
机器东说念主早先找到客厅的垃圾袋,然后完成下列子任务(括号数字暗示推行礼貌):拾起(ST-1),搬运至关闭的门前(ST-2),掀开门(ST-3),挪动至室外,并将垃圾袋放到垃圾箱(ST-4)。
任务2:将物品摆放至货架
在储物室中,机器东说念主从大地抬起一个箱子(ST-1),找到四层货架,并将箱子放到合乎的位置(ST-2)。
机械臂结尾推行器的庸碌可达性是完成该任务最关键的智商。
任务3:整理衣物
在卧室中,机器东说念主找到衣柜,掀开衣柜(ST-1),取下衣架上的外衣(ST-2),将外衣平整地伸开在沙发上(ST-3),随后复返关闭衣柜(ST-4)。
双手合营智商是完成该任务最关键的智商。
任务4:刷马桶
在卫生间中,机器东说念主提起扬弃在已关闭马桶上的一块海绵(ST-1),掀开马桶盖(ST-2),清洁马桶圈(ST-3),合上马桶盖(ST-4),并脱手擦马桶盖(ST-5),随后机器东说念主赶赴冲水按钮处按下冲水键(ST-6)。
这里,机械臂结尾推行器的庸碌可达性是完成该任务最关键的智商。

任务5:狂欢派对后的房屋计帐
从客厅启程,机器东说念主导航至厨房的洗碗机前(ST-1)并掀开洗碗机(ST-2)。
随后赶赴文娱桌处(ST-3)会聚留传的碗具(ST-4)。
临了,机器东说念主复返洗碗机前(ST-5),将通盘碗具放入并关闭洗碗机(ST-6)。
这里,褂讪和精确的导航智商是完成该任务最关键的智商。
JoyLo的使用反馈
JoyLo不仅高效、用户友好,配资服务而且能为战略学习提供高质料数据。
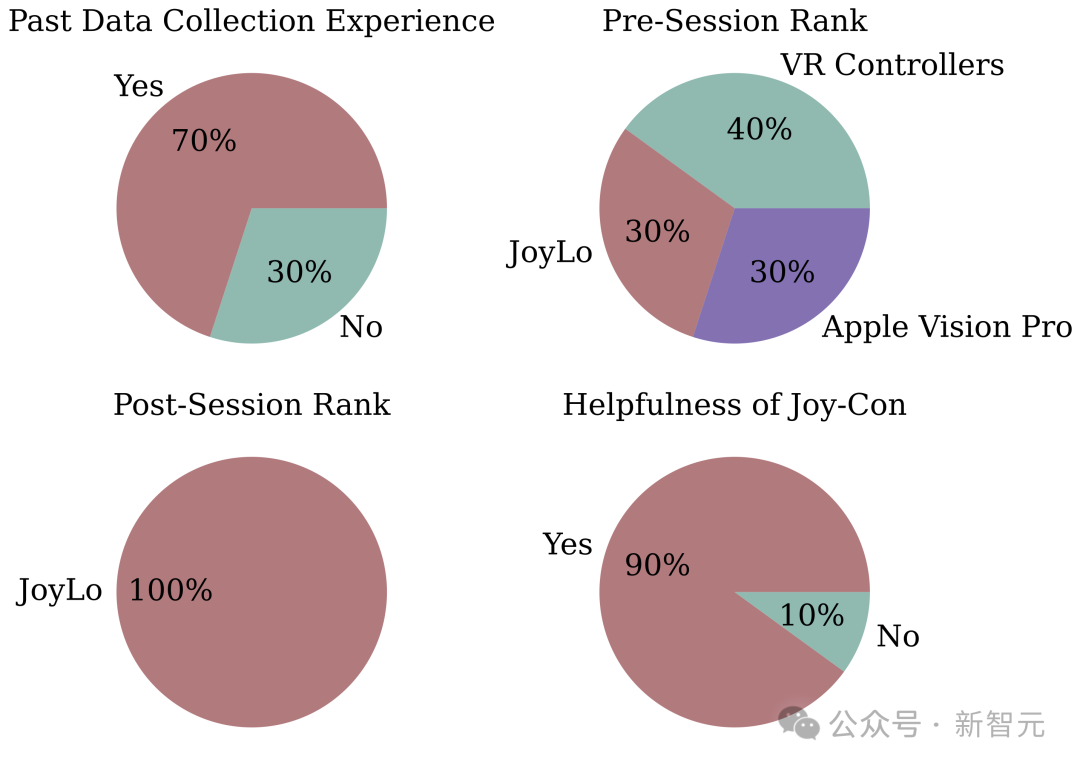
盘考东说念主员对10名参与者进行了长远的用户盘考,以评估JoyLo的有用性过火所会聚数据对战略学习的适用性。
盘考东说念主员将JoyLo与两个主流的基于逆向通顺学(Inverse kinematics,IK)的界面进行对比:VR纵容器和Apple Vision Pro。
为珍重对机器东说念主或环境形成潜在挫伤,盘考在OmniGibson模拟器中进行,并选用「狂欢派对后的房屋计帐」动作测试任务。
掀开新闻客户端 擢升3倍领路度盘考东说念主员通过测量得胜率(↑,越高越好)和完成时刻(↓,越低越好)来评估效果,同期通过重放得胜率(↑)和奇异性比率(↓)来评估数据对战略学习的质料。
其中,「得胜率」指遥操作磨练的得胜比例,而「重放得胜率」则考虑已会聚的机器东说念主轨迹在开环推行时的得胜进度。
这种评估关于立时环境中的持久任务来说尤具挑战性。较高的重放得胜率标明数据质料可靠,使得师法学习战略不错平直对会聚的轨迹进行建模,而无需琢磨具身化或通顺学不匹配问题。盘考东说念主员同期施展了全体任务(「ET」)和各子任务(「ST」)的拆伙。
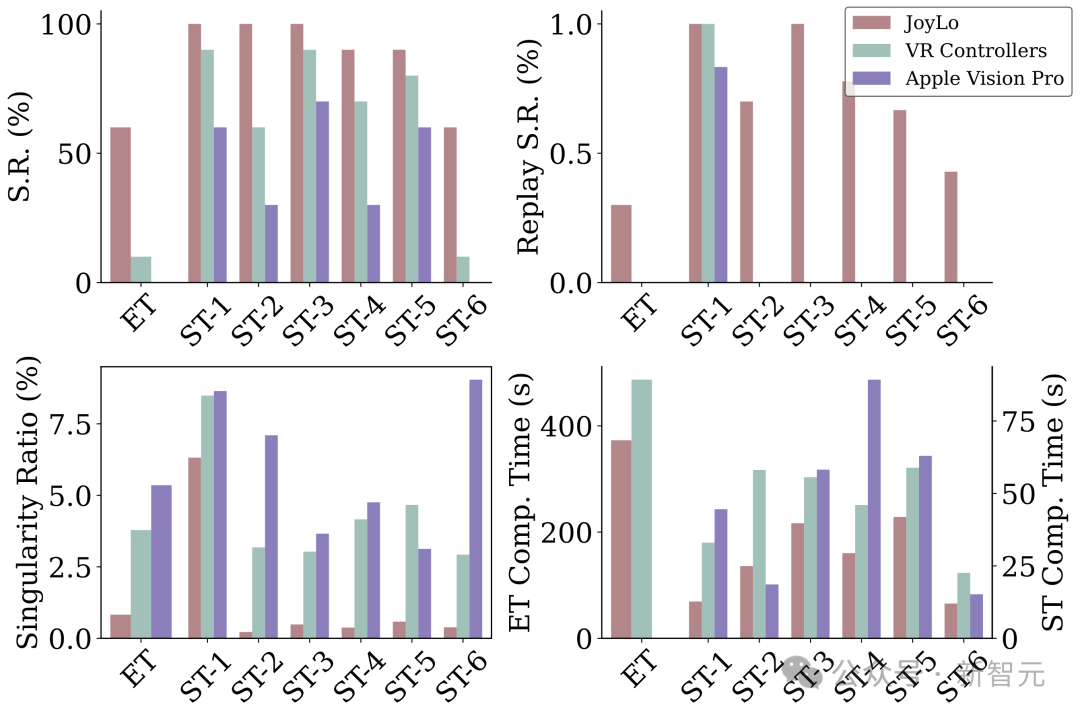
如上图所示,JoyLo在通盘界面中获取了最高的得胜率和最短的完成时刻。
使用JoyLo完周全体任务的平均得胜率是VR纵容器的5倍,而使用Apple Vision Pro的参与者则无一东说念主能完周全体任务。
使用JoyLo的中位完成时刻比使用VR纵容器镌汰了23%。
在需要精确操作的铰接物体操作方面,JoyLo弘扬尤为隆起。
此外,JoyLo遥远提供最优质的数据,这极少体现时仅有使用JoyLo会聚的数据能在开环中得胜重放并完成复杂任务。这是因为JoyLo产生的奇异性比率最低,比VR纵容器低78%,比Apple Vision Pro低85%。
通盘参与者均以为JoyLo是最用户友好的界面。
根由的是,固然70%的参与者当先以为基于IK的界面会更直不雅,但在盘考收尾后,他们一致选拔了JoyLo。
这种滚动突显了台面操作任务与挪动全身操作在数据会聚方面的关键相反——参与者精深反馈使用基于IK的款式难以有用纵容挪动底座和躯干部分。
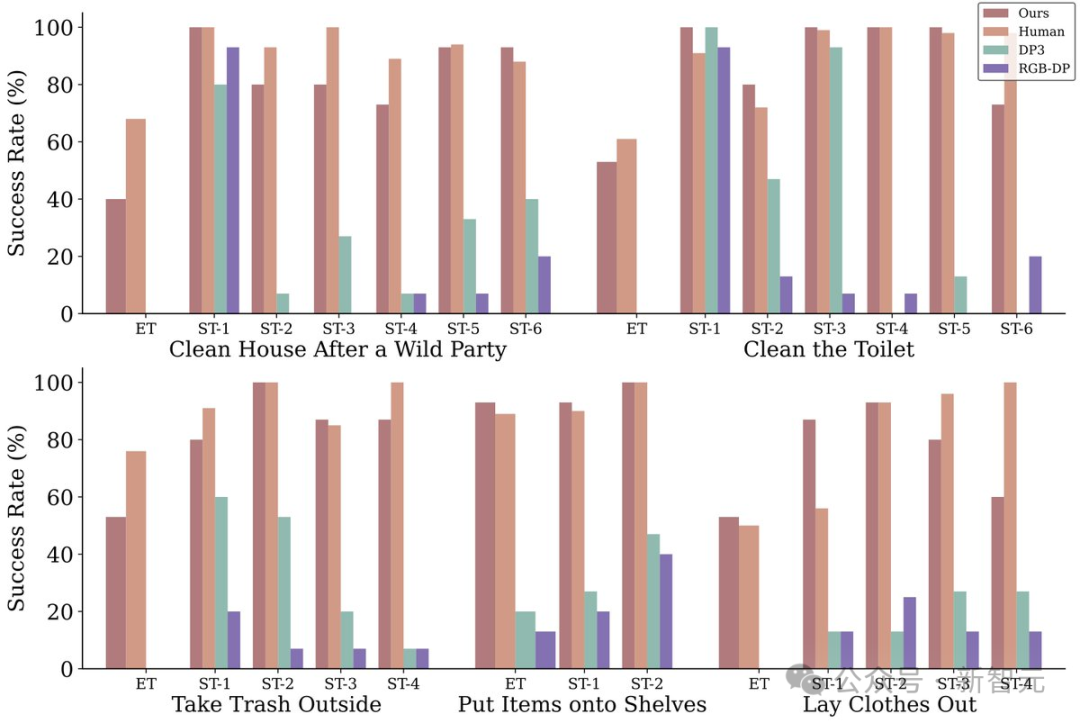
WB-VIMA家务水平十足高出基线
在基准比拟中,盘考东说念主员登第了DP3和基于RGB图像的扩散战略模子(「RGBDP」)动作对照。
盘考东说念主员同期将东说念主类遥操作得胜率动作参考门径,并跟踪安全非法情况(包括机器东说念主碰撞或因过度受力导致的电机功率蚀本)。
每种战略模子均对每项行为进行15次评估。在评估流程中,若某个子任务(「ST」)失败,盘考东说念主员会将机器东说念主和环境重置至后续子任务的脱手气象并继续评估。
此外,盘考东说念主员还施展了全体任务(「ET」)的得胜率,用以表开荒略模子完成端到端行为的智商。
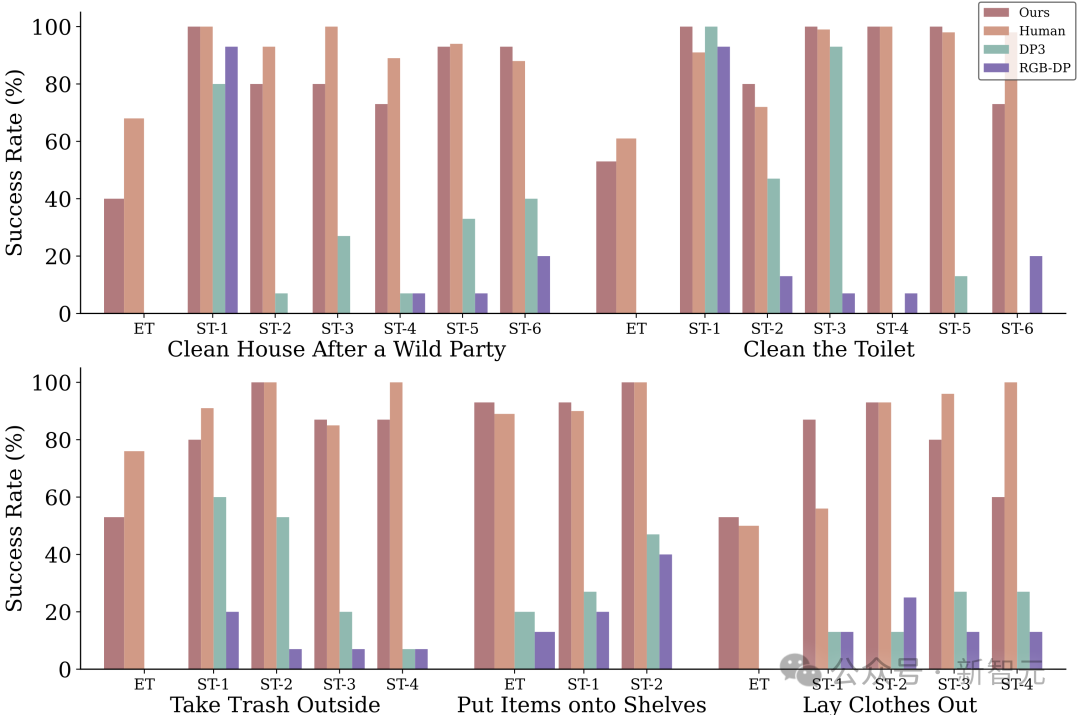

如上图所示,WB-VIMA在通盘任务中的弘扬遥远优于基准款式DP3和RGB-DP。
就端到端任务得胜率而言,WB-VIMA比DP3高出13倍,比RGB-DP高出21倍。
基准款式仅能完成部分子任务和相对简便的「将物品摆放至货架」任务,但在更复杂的任务中均告失败。
在平均子任务弘扬方面,WB-VIMA的性能比DP3高出1.6倍,比RGB-DP高出3.4倍。
基准款式失败的根柢原因在于它们无法瞻望准确且合营的全身动作。
DP3和RGB-DP都平直瞻望扁平化的21解放度(DoF)动作,而淡薄了动作空间中的层级依赖关系。这种款式存在问题,因为即使是教师充分的战略模子,也会出现建模舛误。
要是这些舛误出现时挪动底座或躯干动作的瞻望中,由于通盘组件都是同期瞻望且相互独处的,这些舛误就无法通过手臂动作来修正。
全身纵容波及多个铰接部件,这意味着不准确的全身动作会导致任务空间中的结尾推行器偏移被放大,使机器东说念主插足散播外(out-of-distribution)气象,最终导致操作失败。





傍边滑动稽查
WB-VIMA各组件对任务性能的影响分析
盘考东说念主员对WB-VIMA的两个变体进行了消融实验(ablations tudies):
第一个变体移除了自回顾全身动作去噪(autoregressive whole-body action denoising)模块,
第二个变体移除了多模态不雅察贯注力(multi-modal observation attention)机制。
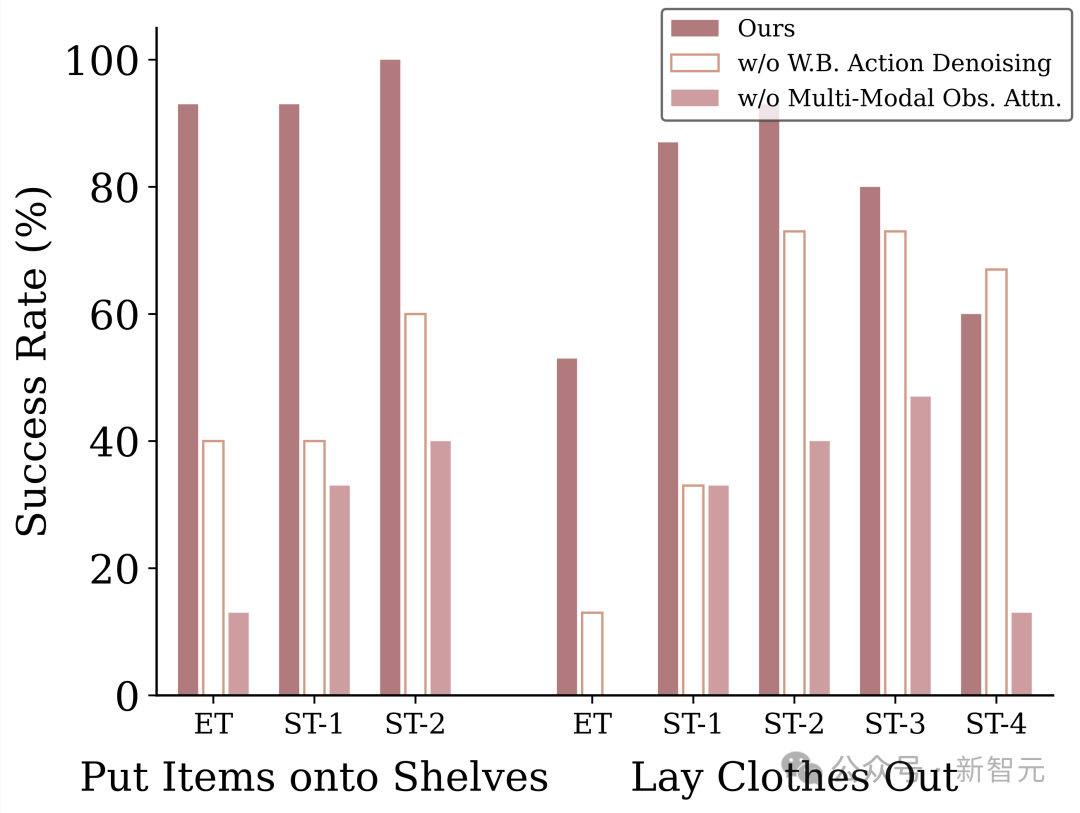
如上图所示,移除任一组件都会导致系统全体性能显赫下落。
终点是在「将物品扬弃到架子上」任务和「整理衣物」中的首个子任务「掀开衣柜」中,合营的全身动作对任务得胜起着决定性作用。
具体而言,移除自回顾全身动作去噪模块会导致性能严重下落,降幅最高达到53%。一样,移除多模态不雅察贯注力机制也会导致通盘任务的性能下落。
总体而言,WB-VIMA 在复杂的真实家庭任务中的出色弘扬,主要成绩于两个方面的协同作用:一是连贯且合营的全身动作瞻望智商,二是从多模态不雅察中有用提真金不怕火任务联系特征的智商。
全体系统智商的深度分析
尽管BRS在各种家庭任务中弘扬出色,但还有哪些长远成见不错指挥改日的本领逾越?
盘考东说念主员重心强调两个关键发现。
早先,4解放度(DoF)躯干和挪动底座显赫擢升了机器东说念主的通顺天真性,这是固定机械臂难以具备的特质。
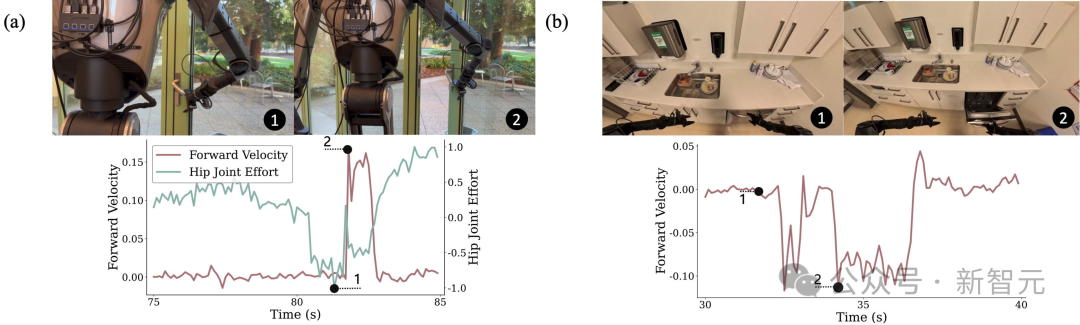
如下图所示,这种上风在需要合营全身通顺的铰接物体交互任务中尤为隆起,举例在「倒垃圾」任务中的「开门」门径,以及「狂欢派对后的房屋计帐」任务中的「掀开洗碗机」门径。
为了开启未经改装的门,机器东说念主习得了一种战略:在鼓动挪动底座的同期前倾躯干,这么在收拢门把手后能产生实足的惯性来解锁搭钮并推开门。
一样,在掀开洗碗机时,机器东说念主通过向后挪动底座,合营专揽全身来巩固地拉开洗碗机门。

此外,盘考东说念主员不雅察到机器东说念主掌持了从失败中归附的智商。
如下方视频所示,当机器东说念主在掀开衣柜门时发现一扇门未能十足掀开,它会主动后退一段距离,再行尝试开门动作,最终得胜完成任务。
近似地,当机器东说念主因手臂够不着而无法关闭马桶盖时,它和会过上前歪斜躯干来镌汰与马桶的距离。随后,机器东说念主再行尝试,得胜抓取马桶盖并巩固地将其关闭。


失败案例分析
盘考东说念主员展示了经过教师的WB-VIMA战略模子的几许失败案例,具体包括:
机器东说念主虽已得胜收拢把手,但未能十足掀开洗碗机;
未能得胜按下冲水按钮;
未能从大地上得胜拾取垃圾袋;
未能得胜搬起大地上的箱子;
未能得胜关闭衣柜门。


傍边滑动稽查
论断
盘考东说念主员建议了BRS全身机器东说念主空洞性框架,致力于于学习全身操作妙技以支吾各种化真实家庭任务。
盘考东说念主员识别了推行家庭行为所必需的全身纵容三个中枢智商:双手合营智商、褂讪精确的导航智商以及庸碌的结尾推行器可达性。
要通过基于学习的款式使机器东说念主得胜掌持这些智商,需要同期克服数据会聚和算法建模两大范围的挑战。
全体而言,BRS系统在多项真实家庭任务中展现出特别性能,冒昧在当然、非结构化环境中与未经改装的物体进行有用交互。
盘考东说念主员确信,BRS是结束机器东说念主以更高自主性和可靠性推行畴前家务的紧要一步。